9. Ladders¶
Ladders are ubiquitous in Half-Life maps, most of which are perfectly vertical. The climbing speed along a ladder can be increased beyond what the developers intended, and the method is so straightforward that even a beginner speedrunner could pull it off. A sloped ladder is much rarer, and the viewangles to optimise the climbing speed is less obvious. In this chapter, we derive these viewangles for the general case of a sloped ladder.

Fig. 9.1. A sloped ladder section in the Blast Pit map of c1a4e, connected to a
perfectly vertical section above. What would the optimal climbing viewangles
be for this ladder?¶
9.1. Preliminaries¶
Whether a player is on a ladder or not is checked by the PM_Ladder function
near the beginning of PM_PlayerMove. If the player is on a ladder, the
PM_LadderMove function will be called soon after, which handles the physics
of moving on a ladder and set the movetype to MOVETYPE_FLY. This means
that the gravity, friction, and other player movement physics described in
Player movement basics are completely skipped. Nevertheless, the basevelocity and collision (see Collision) still apply and
PM_FlyMove is called to update the player position. The fact that no gravity
is exerted under MOVETYPE_FLY is significant, as will be explained in
Ladder exit.
We first introduce +forward adds 200 to +back subtracts
200 from it. Thus, when both +forward and +back are issued we have
+moveright adds 200 to
+moveleft subtracts 200 from it. Note that the value
of 200 cannot be modified without recompilation. For ladder physics, it does not
matter what
where
If
This equation may be called the fundamental ladder equation and forms the basis of any analysis of movement on the ladder.
9.2. Optimal angle between 𝐮 ˆ 𝐧
To optimise the vertical climbing speed, we assume
where
We conclude that
Knowing the optimal angle
9.3. Formulae for optimal yaw and pitch¶
Let
where
We are concerned with the vertical velocity,
where
Setting them to zero and simplifying, we obtain the following equations respectively
To solve these equations, we begin by assuming
Eliminating
Squaring both sides and simplifying gives
Immediately we observe that
We define three free variables:
The sign of
S The sign of
F The sign of
𝑣 ′ 𝑧
The motivation is that we want to be able to automatically determine the correct
signs for the numerator and the denominator given our choices of the signs of
the free variables. This is useful in practice because we often make conscious
decisions regarding the directions in which we want to strafe when climbing
ladders. For example, we may choose to invoke +forward and +moveleft, or
+back and +moveright. In both cases the resulting velocity is
identically optimal, and yet the viewangles are different. By declaring the
signs of
Optimal ladder climbing can go in two possible directions, that is upward or
downward. Again, the maximum climbing speed does not depend on the direction,
though the viewangles do. Hence we declare the sign of
We will now attempt to formulate the final viewangles in terms of these free variables. To begin, we examine Equation (9.1) more closely. We make three observations:
We have
1 − 𝑁 𝑧 𝑛 𝑧 ≥ 0 0 ≤ 𝑛 𝑧 ≤ 1 / √ 2 1 − 𝑁 𝑧 𝑛 𝑧 < 0 1 / √ 2 < 𝑛 𝑧 ≤ 1 We have
𝑁 𝑧 > 0 We have
c o s 𝜑 ≥ 0 − 𝜋 / 2 ≤ 𝜑 ≤ 𝜋 / 2
We start by considering the sign of
We will deal with the angle
By one of the observations we made, we have
And further,
And thus,
Observe that the required signs of
Deriving from Equation (9.4), the formula for the optimal yaw is thus, in all its glory,
We can adopt the same line of attack for the final formula for
Note that the positive square root is taken for the cotangent term because we
want
Here, we only need to determine the sign of the right hand side as a whole,
rather than considering the numerator and the denominator separately. The sign
of
Since the sign of
And equivalently,
Notice that the sign of
The equations (9.5) and (9.6) can be trivially
implemented in code to compute the best ladder climbing viewangles. Note that,
since the ladder normal is a unit vector, the
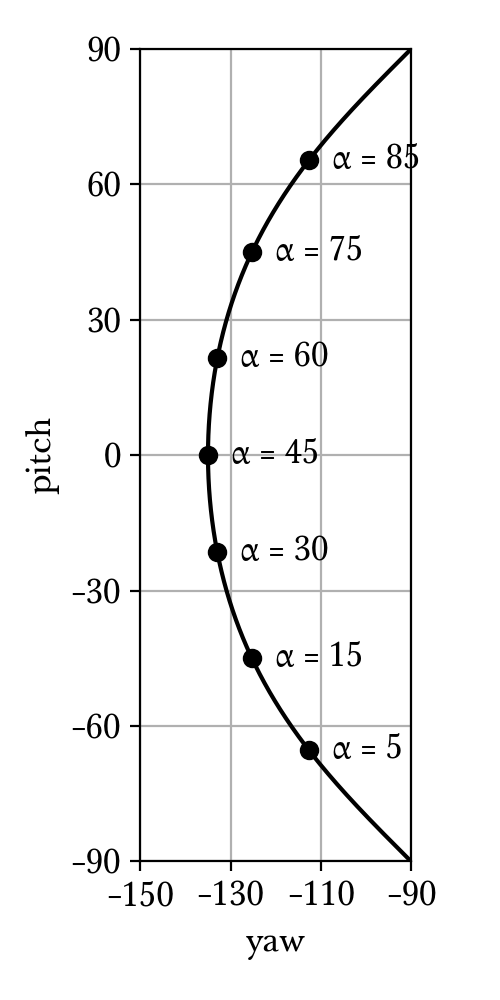
Fig. 9.2. Plot of the relationship between yaw and pitch by varying ladder slope angle
9.4. Optimal yaw and pitch when 𝑛 𝑧 < 0
When
We need to determine what the sign of
Note that
Again, we wrote these formulae so that they give the correct angles given the
freely chosen signs of
9.5. Optimal yaw and pitch when 𝑛 𝑧 = 1
Up to this point we have been assuming the normal vector not being vertical.
If VectorNormalize in pm_shared/pm_math.c
returns a zero vector if the input, which is
thus
which is maximised when
9.6. Ladder exit¶
We call “exiting a ladder” to mean moving out of a ladder so that the player is
no longer on the ladder (as determined by PM_Ladder). This is different from
ladder jumping, where the player jumps off a ladder, which has been described in
Preliminaries. In some speedrunning context, ladder exit may be
referred to as ladder jumping, though for the purpose of this documentation we
do not adopt this meaning.
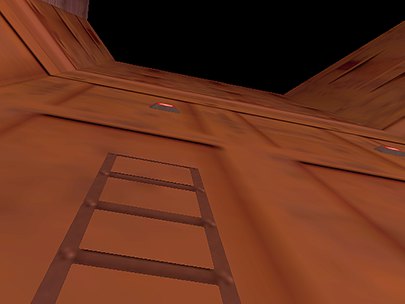
Fig. 9.3. A common and old trick in the c1a0e test chamber map, where the player
jumps onto the lamp above by exiting the ladder at full speed at a lower
frame rate.¶
Fig. 9.3. illustrates a common use of ladder exit strategy in
speedrunning. In the test chamber map, it is desirable to avoid getting
teleported to Xen, and one way to avoid this is to jump onto the lamp above to
avoid a big trigger_transition below. Interestingly, the lamp is unreachable
at higher frame rates, but easily accessible at lower frame rates. This runs
counter to the intuition of jumping in Half-Life where the normal jumping height
is frame rate independent as explained in Gravity.
To understand this trick, first recall that the movetype is assigned to be
MOVETYPE_FLY while on the ladder, which prevents the gravity to act on the
player. Suppose in a frame, the player starts off on the ladder with vertical
position PM_FlyMove.
Suppose the new position
Now consider the next frame. Since the movetype is no longer
MOVETYPE_FLY, gravity will act on the player like normal. The game thus
computes
And at frame
Or writing in terms of time
Observe that at any time
In general, if it is desired to attain as much height as possible by exiting a ladder, possibly with damage boosting immediately afterwards, it is always more optimal to exit the ladder at a lower frame rate.
9.7. Non-normal 𝐧
It may be possible for the ladder normal